


CEM has been developing advanced suspension technology for high-speed off-road applications since 1993. CEM’s active suspension technology substitutes “smart” actuators for normally passive shock absorbers or dampers, adding both sensors and a digital controller to provide unparalleled mobility over all types of terrain while maintaining superlative vehicle stability and ride quality.
For CEM, every active suspension design begins with modeling and simulation. During the M&S design phase an EMS controller designed in Matlab-Simulink is coupled with a vehicle dynamic model in Dynamic Analysis and Design System (DADS) program as shown in Figure 1.
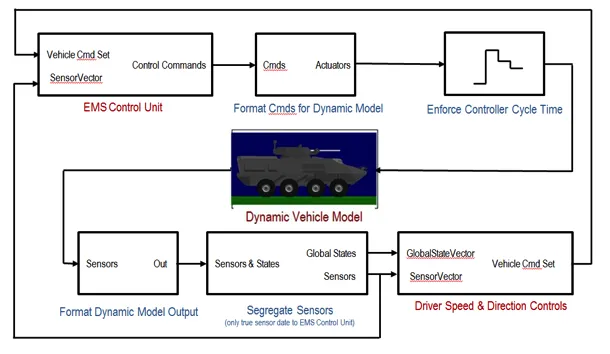
Figure 1. Active Suspension Modeling Approach
This modeling approach allows for separation of controls and vehicle dynamics while enforcing controller cycle times. It also exploits the modular control structure that CEM utilizes on every advanced suspension program. The dynamic vehicle modeling tools used by CEM predict the behavior of multibody systems and incorporates advanced elements that represent controlled actuators, advanced tire models, road-tire contact models, system sensors (acceleration, roll/pitch rate, displacement) passive springs, passive losses and damping, kinematics and dynamics, physical constraints, mechanical joints and their degrees of freedom, terrain profiles and mass properties. These tools provide a GUI based system that eliminates the need to generate basic equations of motion, thereby reducing errors and model development time. These tools are also capable of interfacing with MATLAB Simulink, communicating via “control nodes” at each solution timestep. The dynamic model provides sensor data like vertical acceleration at each timestep, while the EMS Control Unit generates force commands that are fed back to the dynamic vehicle model. Control algorithms developed within MATLAB Simulink through this iterative M&S approach can be easily deployed to facilitate prototype vehicle testing on dSPACE hardware. This code development process has been developed and on our vehicle active suspension programs over 10 demonstration programs (including six full-vehicle demonstrations).
Contact

Dr. Joe Beno
j.beno@cem.utexas.edu
512-232-1619
Projects

Suspension
The UT-CEM EM suspension is a different approach to active suspension systems, referred to as a Near Constant Force Suspension, that allows simplified control strategies and enables smooth rides over rough terrain without the requirement to look-ahead.

Canfield Joint
Design of a high precision pointing system for the NASA Glenn Research Center’s Integrated RF and Optical Communications System (iROC).
